 English
English 
 |












| Quantity: | |
|---|---|
XZWD
Introduction:
By adopting slewing bearing as its core component, slewing drive can bear axial force, radial force and tilting moment simultaneously. Slewing drive is widely applied in modular trailers, all types of cranes, aerial working platform, solar tracking systems and wind power systems.
Electric and planetary gearboxes can be designed according to customer’s requirements. Slewing drive has the advantage for saving space in facilities, max load capacity in a compact design, extensive lifespan, and reduced maintenance costs.
Glossary
1) Tilting Moment Torque: Torque is the load multiplied by distance between the position of load and the center of slewing bearing. If the torque generated by load and distance is greater than the rated tilting moment torque, slewing drive will be overturned.
2) Radial load: Load vertical to the axis of slewing bearing
3) Axial load: Load parallel to the axis of slewing bearing
4) Holding torque: It is the reverse torque. When the drive is rotating reversely, and parts are not damaged,
5) The maximum torque achieved is called holding torque.
6) Self-locking: Only when loaded, the slewing drive is not able to reverse rotate and thus called self-locking.
--Customer can choose the motor according to our already designed slewing drive connect dimension.
--We can design the connect structure according to customer’s motor connect dimension.
--We can help to provide the whole parts with Hydraulic motor, DC motor, AC motor, Stepper or Servo motor.

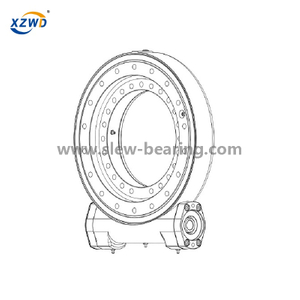
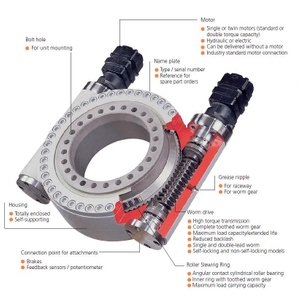
WEA series slewing drive,slew drive is a new series of slewing product, also named as slewing reducer. It is commonly composed of worm, slewing bearing, housing, motor adapter, end cap and other components. By adopting slewing bearing as its core component, slewing drive can bear axial force, radial force and tilting moment simultaneously. Comparing with SE series slewing drive, WEA series have the advantages of better protective performance, great transmission torque, better impact resistance and long working life.
WEA series slewing drive is widely applied in the relatively rotary parts of machinery and solar energy field. Solar tracking system Rotary chassis of aerial working machinery Truck crane Rock drill, drilling machine Grasping wood machine, code molding machine.
 To get drawing (pdf),please clik on Model.
To get drawing (pdf),please clik on Model.
Model | External Dimensions | Installation Dimensions | Mounting Hole Data | |||||||||||||
| Pdf.format | L1 | L2 | L3 | H2 | D0 | D2 | D3 | D4 | D5 | n1 | M1 | T1 | T2 | n2 | M2 | T3 |
mm | Inner Ring | Outer Ring | ||||||||||||||
424 | 330 | 180 | 108 | 360 | 175 | 146 | 222.5 | 270 | 15 | M16 | 30 | 62 | 16 | M16 | 30 | |
509 | 370 | 222.5 | 108 | 445 | 259 | 229 | 310 | 358 | 19 | M16 | 30 | 62 | 18 | M16 | 30 | |
544 | 380 | 240 | 108 | 480 | 295 | 265 | 342 | 390 | 23 | M16 | 30 | 56 | 18 | M16 | 30 | |
534 | 405 | 285 | 108 | 570 | 365.1 | 332 | 430 | 479.4 | 20 | M16 | 32 | 62 | 20 | M16 | 32 | |
762 | 483 | 350 | 130 | 693 | 466.7 | 425 | 540 | 574.2 | 35 | M20 | 40 | 70 | 36 | M20 | 40 | |
861 | 513 | 399 | 130 | 793 | 565 | 525 | 630 | 675 | 35 | M20 | 40 | 70 | 36 | M20 | 40 | |
Model | Rated Ourput Torque kN.m | Tilting Moment Torque kN.m | Static Axial Load kN | Static Radial Load kN | Dynamic Axial Load kN | 56Dynamic Radial Load kN | Holding Torque kN.m | Gear Radio | Output Speed RPM | Self-locking Gears | Weight kg |
WEA9 | 8 | 33.9 | 550 | 205 | 130 | 110 | 38.7 | 62:1 | <3 | Yes | 53kg |
WEA12 | 9.5 | 54.3 | 725 | 270 | 180 | 140 | 43 | 79:1 | <3 | Yes | 66.8kg |
WEA14 | 10.8 | 67.8 | 920 | 343 | 220 | 190 | 48 | 86:1 | <3 | Yes | 75kg |
WEA17 | 12.96 | 135.6 | 1110 | 414 | 268 | 220 | 72.3 | 104:1 | <2 | Yes | 96kg |
WEA21 | 28.7 | 203 | 1595 | 596 | 340 | 270 | 105.8 | 90:1 | <1.5 | Yes | 172kg |
WEA25 | 34.2 | 310 | 1850 | 690 | 440 | 320 | 158.3 | 104:1 | <1.5 | Yes | 202kg |
Enclosed housing slewing drive, slew drive mainly apply to the relatively high condition for high requirement for dust-proof, rain-proof and aniti-corrosion occasion. Precision grade IP65.
Note
1.Different motors(AC,DC,Hydraulic) can be designed according to customer’s requirement.
2.Shaft opposite to motor can choose to be hex head or not hex head.
The slewing drive is a modernized take on the worm drive mechanism that dates back many centuries and was widely used during the Renaissance Era. Pappus of Alexandria (3rd century AD),
a Greek mathematician is credited for an early version of the endless screw, which would later evolve into the worm drive.This mechanism was also used by Leonardo da Vinci as a component in many
of his designs for machines.It can also be found in the notebooks of Francesco di Giorgio of Siena.Many slewing drive concepts found prominence with the emergence of larger scale construction and
engineering in the height of the Greek and Roman Empires.
Traditional worm gear with a 4-start worm.
Slewing drives function with standard worm technology, in which the worm on the horizontal shaft acts as the driver for the gear. The rotation of the horizontal screw turns a gear about an axis perpendicular to the screw axis.
This combination reduces the speed of the driven member and also multiplies its torque; increasing it proportionally as the speed decreases.The speed ratio of shafts depends upon the relation of the number of
threads on the worm to the number of teeth in the worm wheel or gear.
As technology has improved, more slewing drives are using hourglass worm technology, in which the worm is shaped to engage more teeth in the gear.This increased tooth engagement results in greater
strength, efficiency and durability.
Because of their multiple uses, slewing drives come in a variety of model sizes, performance ranges and mounting characteristics.
The drives are well suited for applications that require both load holding and rotational torque from the same gear box.
They can also be made with dual axes of rotation, (turning axes at the same time) or with dual drives on the same axis, (two worm threads driving the same ring gear in one axis).
The specifications for drives and gears varies depending on the material the gear is composed of. However, a majority of the drives and gears commonly used are composed of steel and phosphor bronze.
According to an extensive series of tests by the Hamilton Gear & Machine Co., chill-cast nickel-phosphor bronze ranked first in resistance to wear and deformation. Number two on the list was SAE No. 65 bronze.For bronze gears a good casting should have the following minimum physical characteristics:
There are many applications in which the slewing drive can be utilized, primarily because it is perfect for applications that require both load-holding power and rotational torque strength.
Typical slewing drive applications include but are not limited to:Solar trackers,wind turbines,Man lifts,Hydraulic Machinery, Telescopic Handlers, Digger Derricks, Lifts, Cranes, Drilling equipment, Military Equipment
Introduction:
By adopting slewing bearing as its core component, slewing drive can bear axial force, radial force and tilting moment simultaneously. Slewing drive is widely applied in modular trailers, all types of cranes, aerial working platform, solar tracking systems and wind power systems.
Electric and planetary gearboxes can be designed according to customer’s requirements. Slewing drive has the advantage for saving space in facilities, max load capacity in a compact design, extensive lifespan, and reduced maintenance costs.
Glossary
1) Tilting Moment Torque: Torque is the load multiplied by distance between the position of load and the center of slewing bearing. If the torque generated by load and distance is greater than the rated tilting moment torque, slewing drive will be overturned.
2) Radial load: Load vertical to the axis of slewing bearing
3) Axial load: Load parallel to the axis of slewing bearing
4) Holding torque: It is the reverse torque. When the drive is rotating reversely, and parts are not damaged,
5) The maximum torque achieved is called holding torque.
6) Self-locking: Only when loaded, the slewing drive is not able to reverse rotate and thus called self-locking.
--Customer can choose the motor according to our already designed slewing drive connect dimension.
--We can design the connect structure according to customer’s motor connect dimension.
--We can help to provide the whole parts with Hydraulic motor, DC motor, AC motor, Stepper or Servo motor.
WEA series slewing drive,slew drive is a new series of slewing product, also named as slewing reducer. It is commonly composed of worm, slewing bearing, housing, motor adapter, end cap and other components. By adopting slewing bearing as its core component, slewing drive can bear axial force, radial force and tilting moment simultaneously. Comparing with SE series slewing drive, WEA series have the advantages of better protective performance, great transmission torque, better impact resistance and long working life.
WEA series slewing drive is widely applied in the relatively rotary parts of machinery and solar energy field. Solar tracking system Rotary chassis of aerial working machinery Truck crane Rock drill, drilling machine Grasping wood machine, code molding machine.
To get drawing (pdf),please clik on Model.
Model | External Dimensions | Installation Dimensions | Mounting Hole Data | |||||||||||||
| Pdf.format | L1 | L2 | L3 | H2 | D0 | D2 | D3 | D4 | D5 | n1 | M1 | T1 | T2 | n2 | M2 | T3 |
mm | Inner Ring | Outer Ring | ||||||||||||||
424 | 330 | 180 | 108 | 360 | 175 | 146 | 222.5 | 270 | 15 | M16 | 30 | 62 | 16 | M16 | 30 | |
509 | 370 | 222.5 | 108 | 445 | 259 | 229 | 310 | 358 | 19 | M16 | 30 | 62 | 18 | M16 | 30 | |
544 | 380 | 240 | 108 | 480 | 295 | 265 | 342 | 390 | 23 | M16 | 30 | 56 | 18 | M16 | 30 | |
534 | 405 | 285 | 108 | 570 | 365.1 | 332 | 430 | 479.4 | 20 | M16 | 32 | 62 | 20 | M16 | 32 | |
762 | 483 | 350 | 130 | 693 | 466.7 | 425 | 540 | 574.2 | 35 | M20 | 40 | 70 | 36 | M20 | 40 | |
861 | 513 | 399 | 130 | 793 | 565 | 525 | 630 | 675 | 35 | M20 | 40 | 70 | 36 | M20 | 40 | |
Model | Rated Ourput Torque kN.m | Tilting Moment Torque kN.m | Static Axial Load kN | Static Radial Load kN | Dynamic Axial Load kN | 56Dynamic Radial Load kN | Holding Torque kN.m | Gear Radio | Output Speed RPM | Self-locking Gears | Weight kg |
WEA9 | 8 | 33.9 | 550 | 205 | 130 | 110 | 38.7 | 62:1 | <3 | Yes | 53kg |
WEA12 | 9.5 | 54.3 | 725 | 270 | 180 | 140 | 43 | 79:1 | <3 | Yes | 66.8kg |
WEA14 | 10.8 | 67.8 | 920 | 343 | 220 | 190 | 48 | 86:1 | <3 | Yes | 75kg |
WEA17 | 12.96 | 135.6 | 1110 | 414 | 268 | 220 | 72.3 | 104:1 | <2 | Yes | 96kg |
WEA21 | 28.7 | 203 | 1595 | 596 | 340 | 270 | 105.8 | 90:1 | <1.5 | Yes | 172kg |
WEA25 | 34.2 | 310 | 1850 | 690 | 440 | 320 | 158.3 | 104:1 | <1.5 | Yes | 202kg |
Enclosed housing slewing drive, slew drive mainly apply to the relatively high condition for high requirement for dust-proof, rain-proof and aniti-corrosion occasion. Precision grade IP65.
Note
1.Different motors(AC,DC,Hydraulic) can be designed according to customer’s requirement.
2.Shaft opposite to motor can choose to be hex head or not hex head.
The slewing drive is a modernized take on the worm drive mechanism that dates back many centuries and was widely used during the Renaissance Era. Pappus of Alexandria (3rd century AD),
a Greek mathematician is credited for an early version of the endless screw, which would later evolve into the worm drive.This mechanism was also used by Leonardo da Vinci as a component in many
of his designs for machines.It can also be found in the notebooks of Francesco di Giorgio of Siena.Many slewing drive concepts found prominence with the emergence of larger scale construction and
engineering in the height of the Greek and Roman Empires.
Traditional worm gear with a 4-start worm.
Slewing drives function with standard worm technology, in which the worm on the horizontal shaft acts as the driver for the gear. The rotation of the horizontal screw turns a gear about an axis perpendicular to the screw axis.
This combination reduces the speed of the driven member and also multiplies its torque; increasing it proportionally as the speed decreases.The speed ratio of shafts depends upon the relation of the number of
threads on the worm to the number of teeth in the worm wheel or gear.
As technology has improved, more slewing drives are using hourglass worm technology, in which the worm is shaped to engage more teeth in the gear.This increased tooth engagement results in greater
strength, efficiency and durability.
Because of their multiple uses, slewing drives come in a variety of model sizes, performance ranges and mounting characteristics.
The drives are well suited for applications that require both load holding and rotational torque from the same gear box.
They can also be made with dual axes of rotation, (turning axes at the same time) or with dual drives on the same axis, (two worm threads driving the same ring gear in one axis).
The specifications for drives and gears varies depending on the material the gear is composed of. However, a majority of the drives and gears commonly used are composed of steel and phosphor bronze.
According to an extensive series of tests by the Hamilton Gear & Machine Co., chill-cast nickel-phosphor bronze ranked first in resistance to wear and deformation. Number two on the list was SAE No. 65 bronze.For bronze gears a good casting should have the following minimum physical characteristics:
There are many applications in which the slewing drive can be utilized, primarily because it is perfect for applications that require both load-holding power and rotational torque strength.
Typical slewing drive applications include but are not limited to:Solar trackers,wind turbines,Man lifts,Hydraulic Machinery, Telescopic Handlers, Digger Derricks, Lifts, Cranes, Drilling equipment, Military Equipment


















 Español
Español  简体中文
简体中文 